\title {Origins of Mind: Lecture Notes \\ Lecture 08}
\maketitle

Origins of Mind
Lecture 08
s.butterfill@warwick.ac.uk
\def \ititle {Origins of Mind}
\def \isubtitle {Lecture 08}
\
\begin{center}
{\Large
\textbf{\ititle}: \isubtitle
}
\iemail %
\end{center}
\section{Action: The Basics}
\section{Action: The Basics}
\#source 'research/teleological stance -- csibra and gergely.doc'
\#source 'lectures/mindreading and joint action - philosophical tools (ceu budapest 2012-autumn fall)/lecture05 actions intentions goals'
\#source 'lectures/mindreading and joint action - philosophical tools (ceu budapest 2012-autumn fall)/lecture06 goal ascription teleological motor'
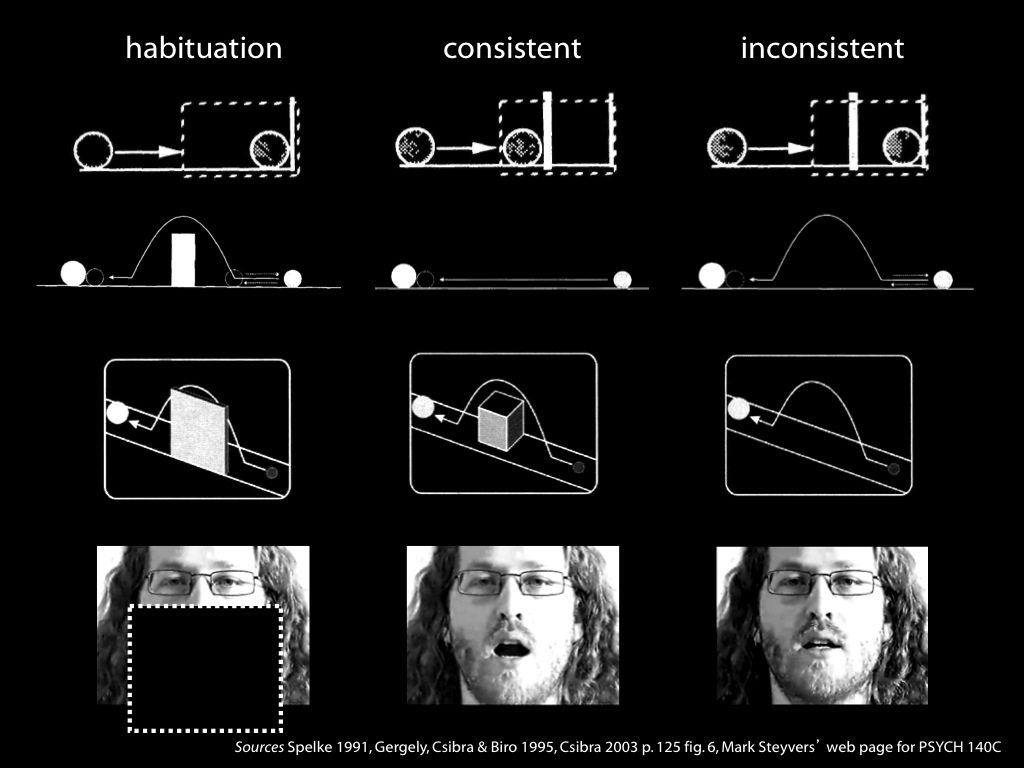
When do human infants first track goal-directed actions and not just movements?
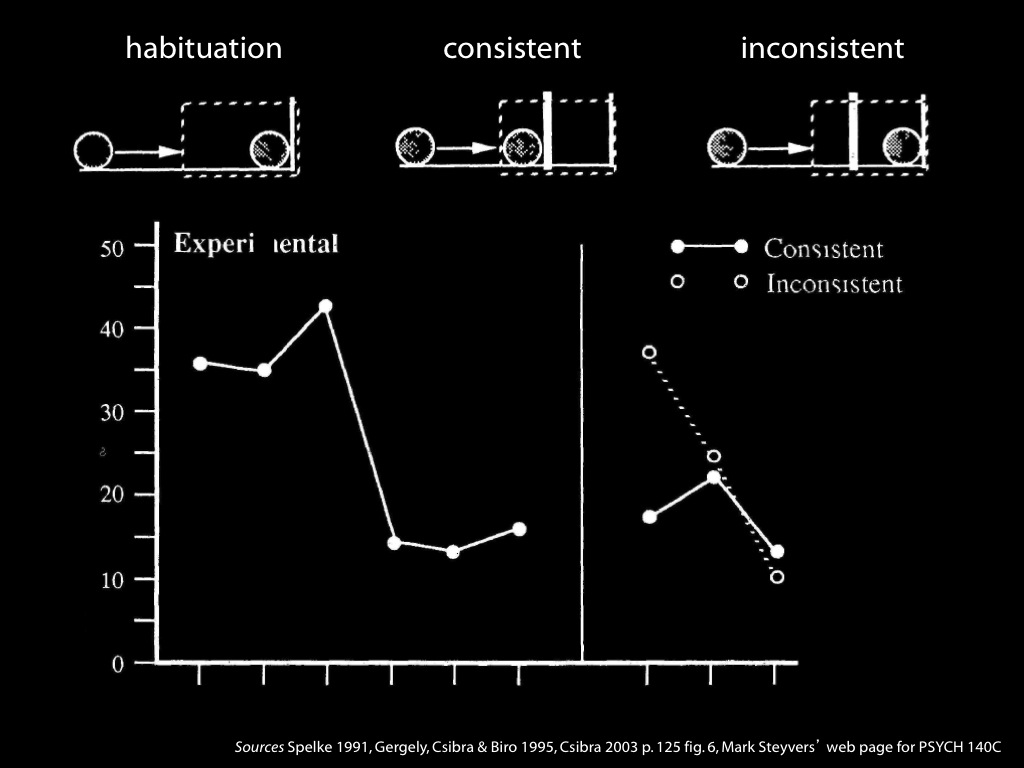
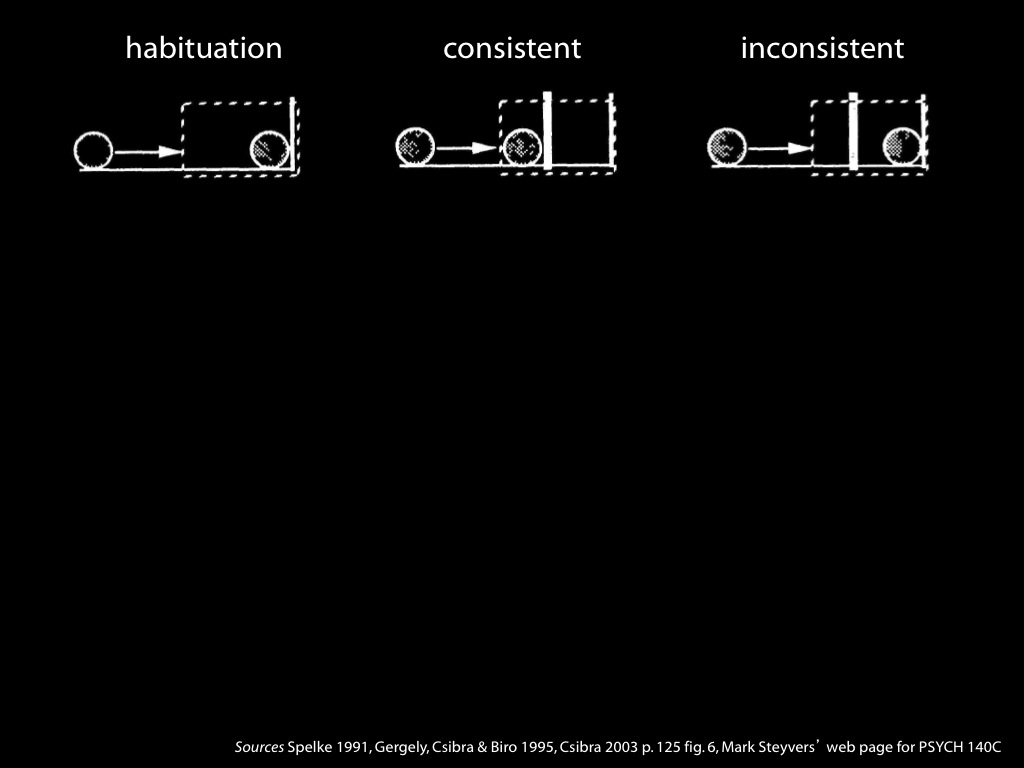
Here's a classic experiment from way back in 1995.
The subjects were 12 month old infants.
They were habituated to this sequence of events.
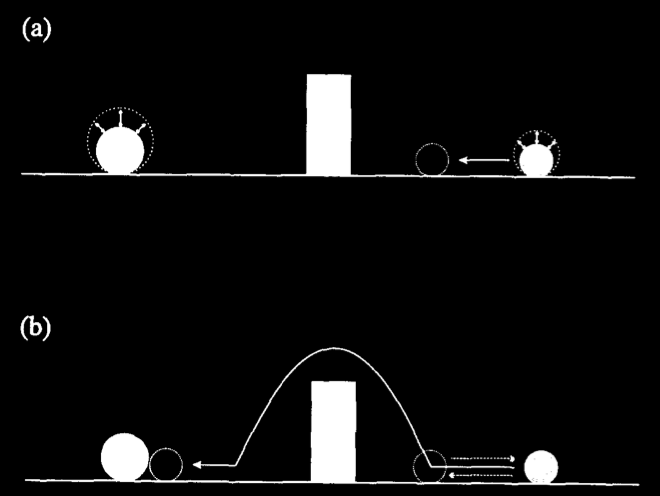
Gergely et al 1995, figure 1
There was also a control group who were habituated to a display like this one but with the central barrier moved to the right, so that the action of the ball is 'non-rational'.
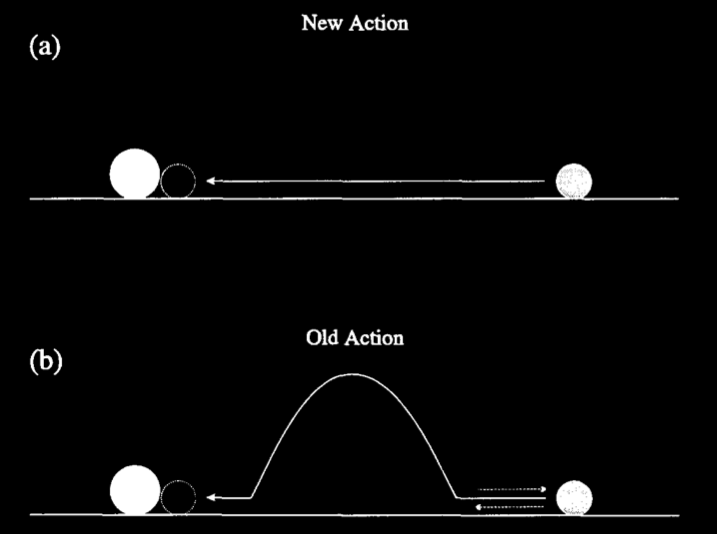
For the test condition, infants were divided into two groups. One saw a new action, ...
... the other saw an old action.
Now if infants were considering the movements only and ignoring information about the goal, the 'new action' (movement in a straight line) should be more interesting because it is most different.
But if infants are taking goal-related information into acction, the 'old action' might be unexpected and so might generate greater dishabituation.
Gergely et al 1995, figure 3
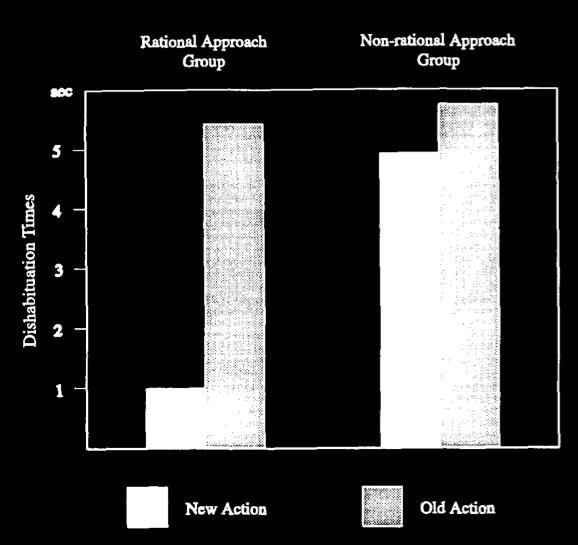
Gergely et al 1995, figure 5
‘by the end of the first year infants are indeed capable of taking the intentional stance (Dennett, 1987) in interpreting the goal- directed behavior of rational agents.’
\citep[p.\ 184]{Gergely:1995sq}
‘12-month-old babies could identify the agent’s goal and analyze its actions causally in relation to it’
\citep[p.\ 190]{Gergely:1995sq}
You might say, it's bizarre to have used balls in this study, that can't show us anything about infants' understanding of action.
But adult humans naturally interpret the movements of even very simple shapes in terms of goals.
So using even very simple stimuli doesn't undermine the interpretation of these results.
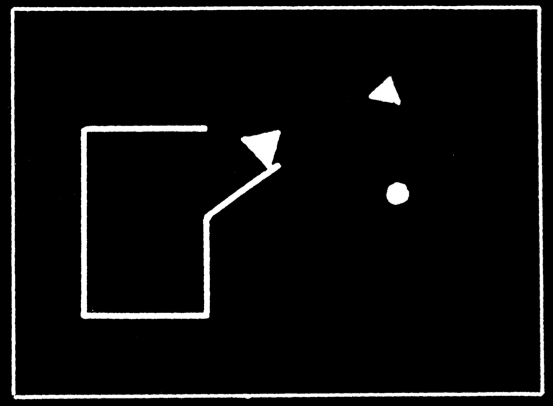
Heider and Simmel, figure 1
Consider a related study by Woodward and colleagues.
(It's good that there is converging evidence from different labs, using quite different stimuli.)
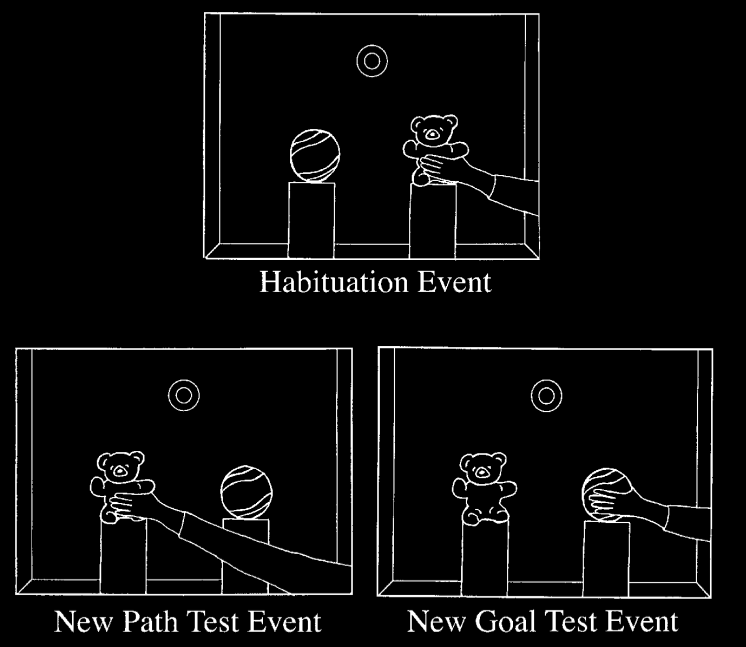
Woodward et al 2001, figure 1
'Six-month-olds and 9-month-olds showed a stronger novelty response (i.e., looked longer) on new-goal trials than on new-path trials (Woodward 1998). That is, like toddlers, young infants selectively attended to and remembered the features of the event that were relevant to the actor’s goal.'
\citep[p.\ 153]{woodward:2001_making}
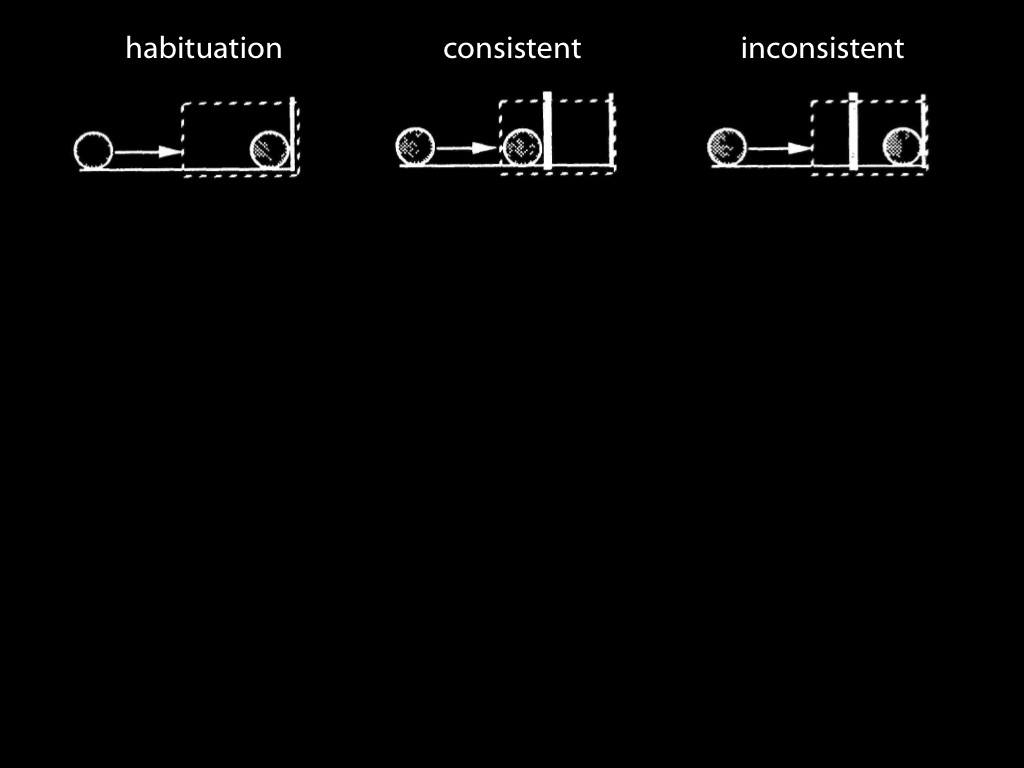
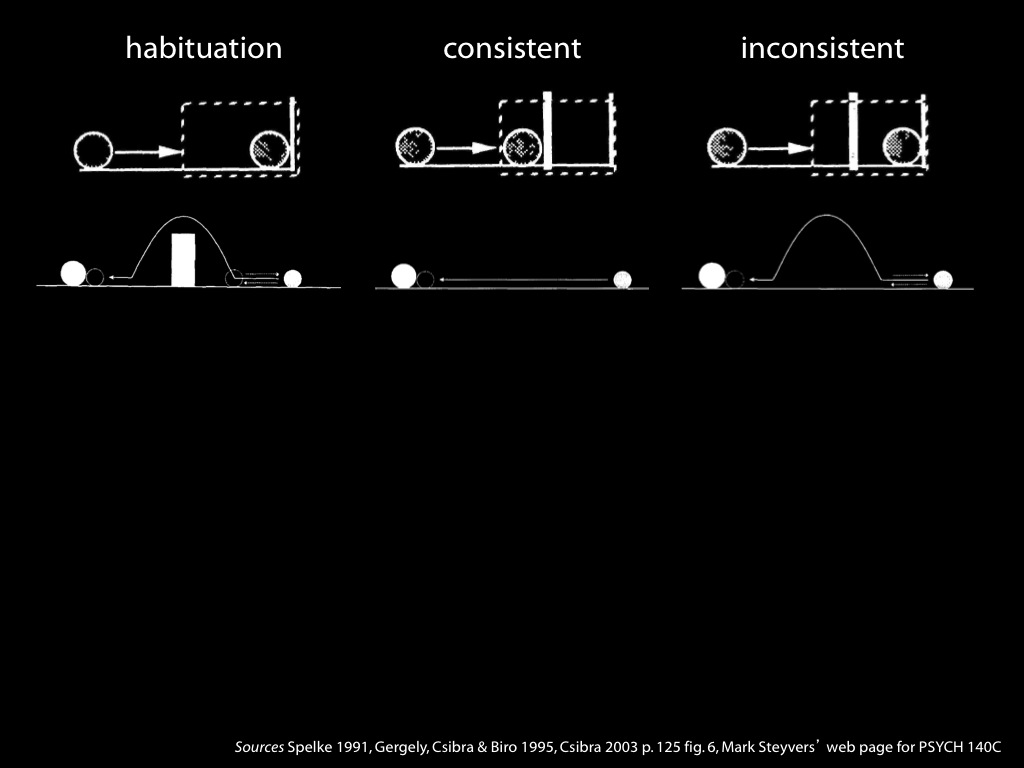
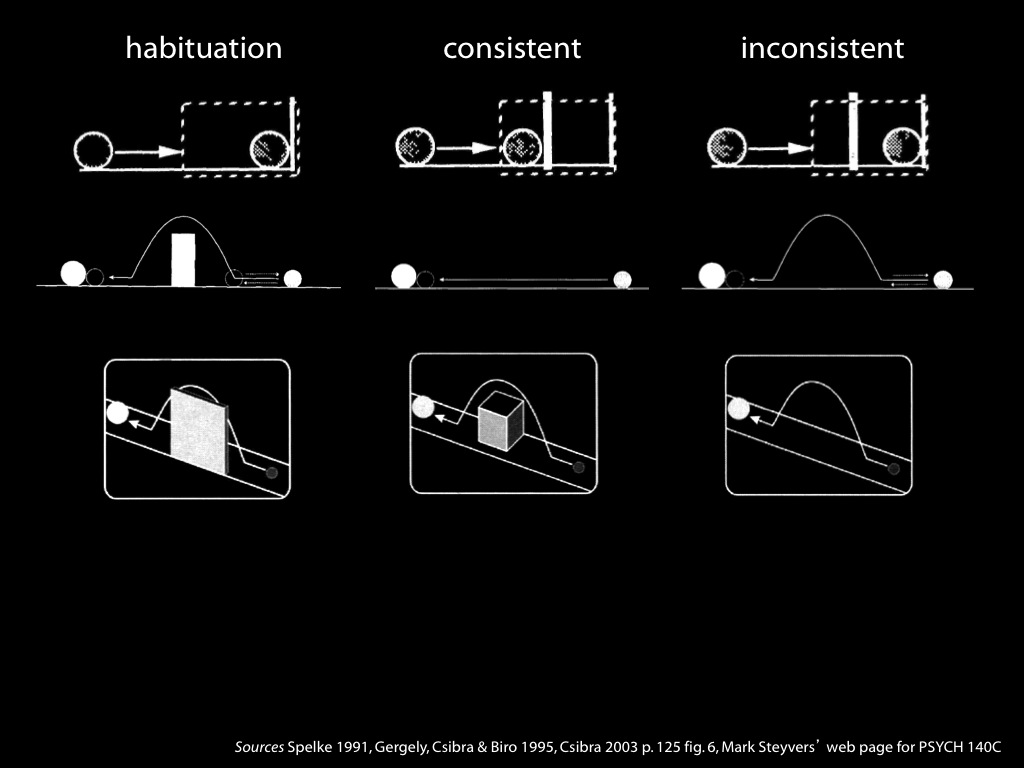
Consider a further experiment by \citet{Csibra:2003jv}.
This is just like the first ball-jumping experiment except that here infants see the action but not the circumstances in which it occurs.
Do they expect there to be an object in the way behind that barrier?
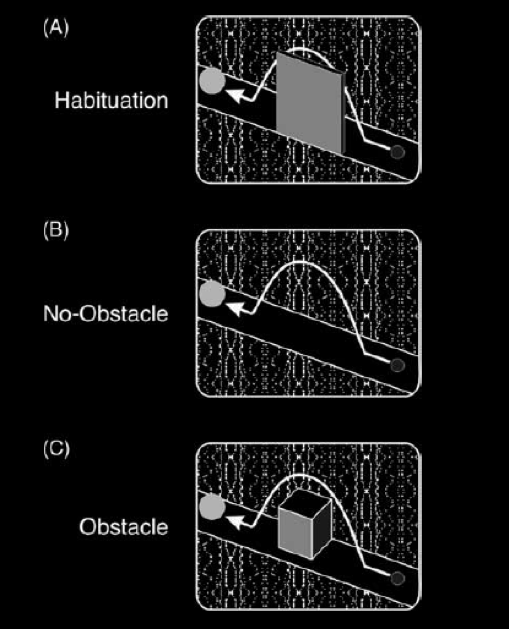
Csibra et al 2003, figure 6
I already mentioned this classic study by Heider and Simmel.
This kind of study has been done with human adults quite a bit since then.
It is quite tempting to suppose that what we see here is automatic ascription of goals in adults.
Heider and Simmel, figure 1
[Here I'm not trying to provide evidence, only to explain what the claim commits us to.]
Recall this habituation experiment.
they suggets that both
The new Gergely et al experiment about action is based on the same habituation technique.
If I had more time, I'd tell you a long story about speech and action.
Maybe some of us will get together another time and I can tell you that story then.
(*nb: \citep{zwickel:2010_interference} also argue for perceptual categories in perceiving actions, and do so by comparison with pop-out effects for orientations.)
Subjects have to judge whether the dot is to the left or the right of the triangle (from their perspective).
If you think this is just a triangle, then it doesn't have a left or right so there's no congruent or incongruent.
But if you think the triangle performs goal directed actions, then in the figure on the top right, the dot is left of the triangle from your point of view but right of the triangle from its point of view.
Could there be altercentric interference?
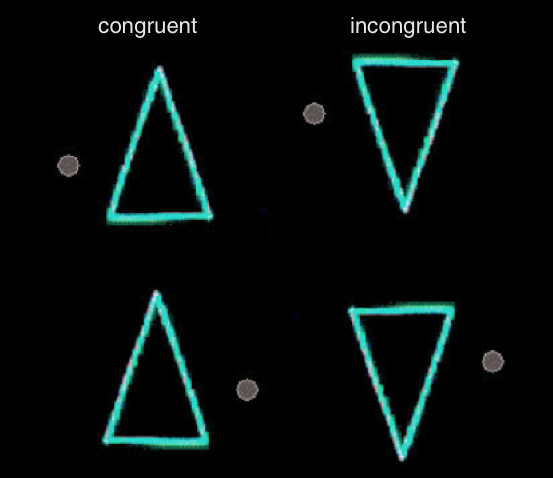
Zwickel et al 2011, figure 1
Here are the results.
When the triangle makes random movements: there's no difference in RT between congruent and incongruent conditions. (As you'd expect---this just shows that there's nothing wrong with the setup.)
(The experiment involved comparing neurotypical (ordinary) subjects with AS subjects; that's interesting but too complex for us so we'll just focus on the neurotypical subjects' perforamnce.)
Could there be altercentric interference?
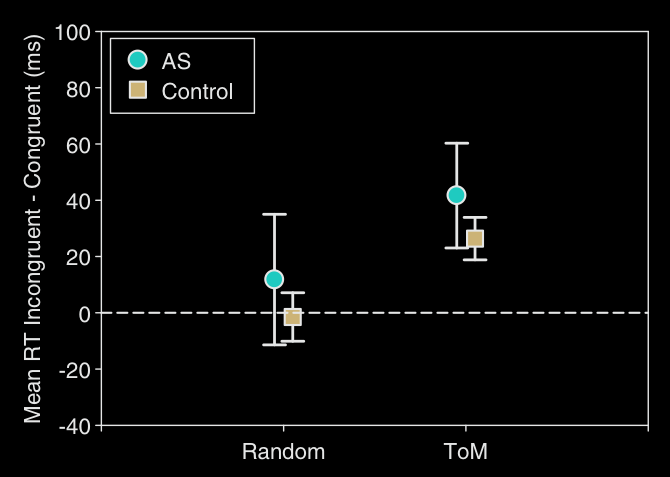
Zwickel et al 2011, figure 2
What can we conclude?
For adults, tracking information about goals makes one susceptible to interference from other other's perspective---it makes one susceptible to evaluting left and right from another's point of view.
This altercentric interference effect is a long way short of showing that the goal ascription is automatic or perceptual.
After all, such interference might be a consequence of thinking reflectively about the goals of the objects.
But it is at least a step in the direction in that it shows that, in adults, goal ascription can at least have effects on automatic processes.
(If automatic processes are informationally encapsulated, then this is evidence that goal ascription is automatic.)
(*Other evidence: \citep{Gao:2010,Teufel:2010})
Zwickel et al 2011, figure 1
altercentric interference

How Do Infants Model Actions?
\section{How Do Infants Model Actions?}
\section{How Do Infants Model Actions?}
The key to answering this question (what is a model of action?) is to understand what a model
of action needs to achieve.
Part or all of what is needs to achieve is a specification of how purposive actions are related
to their goals.
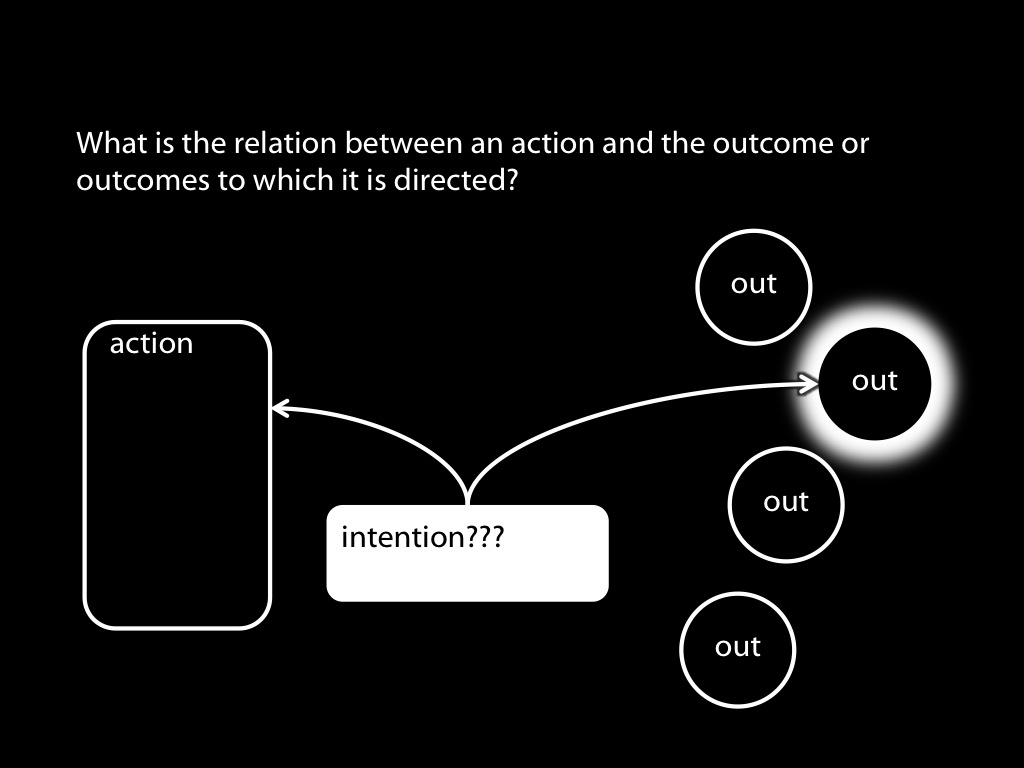
That is, the model has to answer this question:
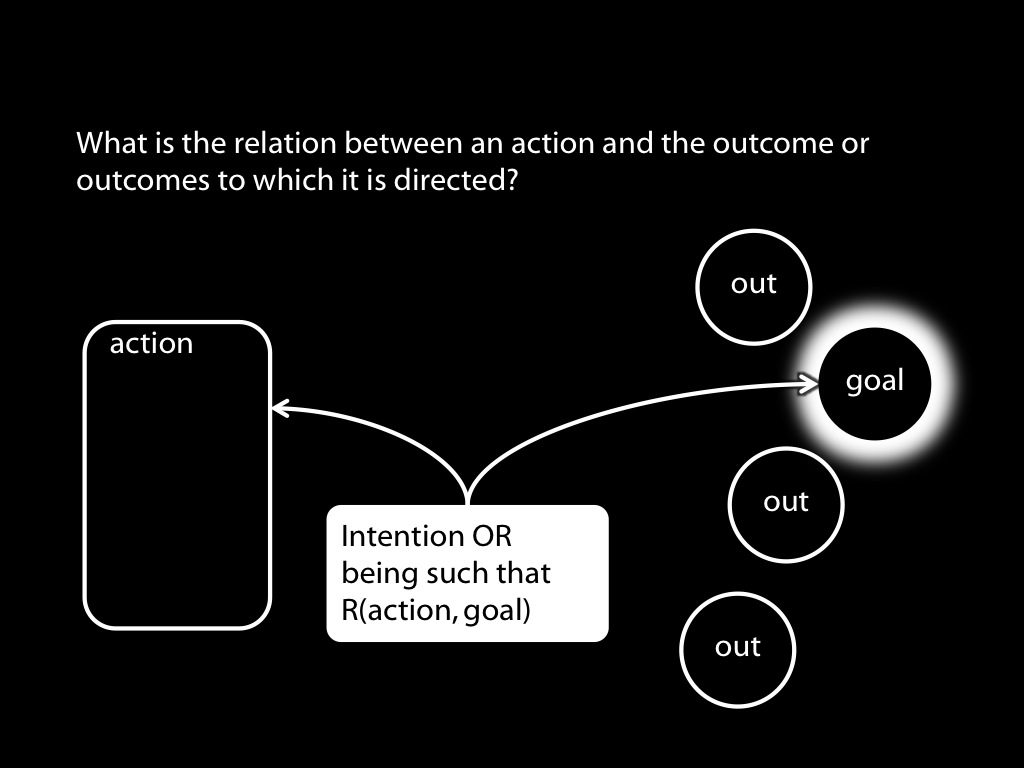
What is the relation between an action and the outcome or outcomes to which it is directed?
One feature of actions is that, among all their actual and possible outcomes, some are goals to
which they are directed.
I seize little Isabel by the wrists and swing her around, thereby making her laugh and
breaking a vase.
You might wonder what the goal of my action was.
Did I act in order to break the vase or to make Isabel laugh?
Or was my action perhaps directed to some other goal, one that was not realised so that my
action failed?
A model of action has to specify the relation between actions and the
goal or goals to which they are directed.
That is, it has to answer this question:
Among all of the actual and possible outcomes of an action, which are goals of the action?
The standard answer to this question involves intention.
An intention (1) represents an outcome, (2) causes an event; and (3) causes an event whose
occurrence would normally lead to the outcome’s occurrence.
What singles out an actual or possible outcome as one to which the component actions are
collectively directed? It is the fact that this outcome is represented by the intention.
Note, by the way, that goals are not intentions.
Goals are actual or possible outcomes.
They are states of affairs.
Intentions, by contrast, are or involve mental states that represent a goal; they are a
variety of goal-states.
It would be a terrible mistake to confuse a goal with a goal-state.
That would be like confusing a person with a photograph.
So, on one model of action,
the intention is what links an action to the outcomes to which it is directed.
Is this the model of action that infants' actually use?

Does Infants’ Model of Action Involve Intentions?
\section{Does Infants’ Model of Action Involve Intentions?}
\section{Does Infants’ Model of Action Involve Intentions?}
So we have this model of action,
where the relation between an action and a goal exists in virtue of an intention
which represents the goal, coordinates the action, and coordinates the action in such a way
that, normally, the existence of the action increases the probability that the outcome will
occur.
Our question is whether this is infants' model of action.
To answer this question we need first to understand more about the model.
In particular we need to know ...
What is an intention?
[*new route: for the purposes of understanding these agents, we want the simplest possible notion of intention; so we'll take intention as an action-causing belief-desire pair.
The idea I want to consider is, surprisingly, that there are no such things as intentions.
\begin{quote}
`The expression `the intention with which James went to church' has the outward form of a description, but in fact it
...\ % is syncategorematic and
cannot be taken to refer to an entity, state, disposition, or event. Its function in context is to generate new descriptions of actions in terms of their reasons; thus `James went to church with the intention of pleasing his mother' yields a new, and fuller, description of the action described in `James went to church'.'
\citep[p.\ 690]{davidson:1963_orig}
\end{quote}
What motivates this view?
We already have beliefs and desires in our model of action explanation.
Introducing intentions as additional mental states would make the model more complicated.
So if we can do without intentions, we should do so in the interests of simplicity.
But how can we do without intentions?
Haven't we just seen that we need intentions in order to explain the relation between an action and the goal or goals to which it is directed?
Here's how Davidson's view works.
James desired to please his mother.
James believed that going to church would please his mother.
And this belief and desire caused his going to church.
So the belief--desire pair can play the role of an intention.
It (1) represents an outcome---in this case, the pleasing of James' mother---, (2) causes an event---James' going to church---; and (3) causes an event whose occurrence would normally lead to the outcome’s occurrence.
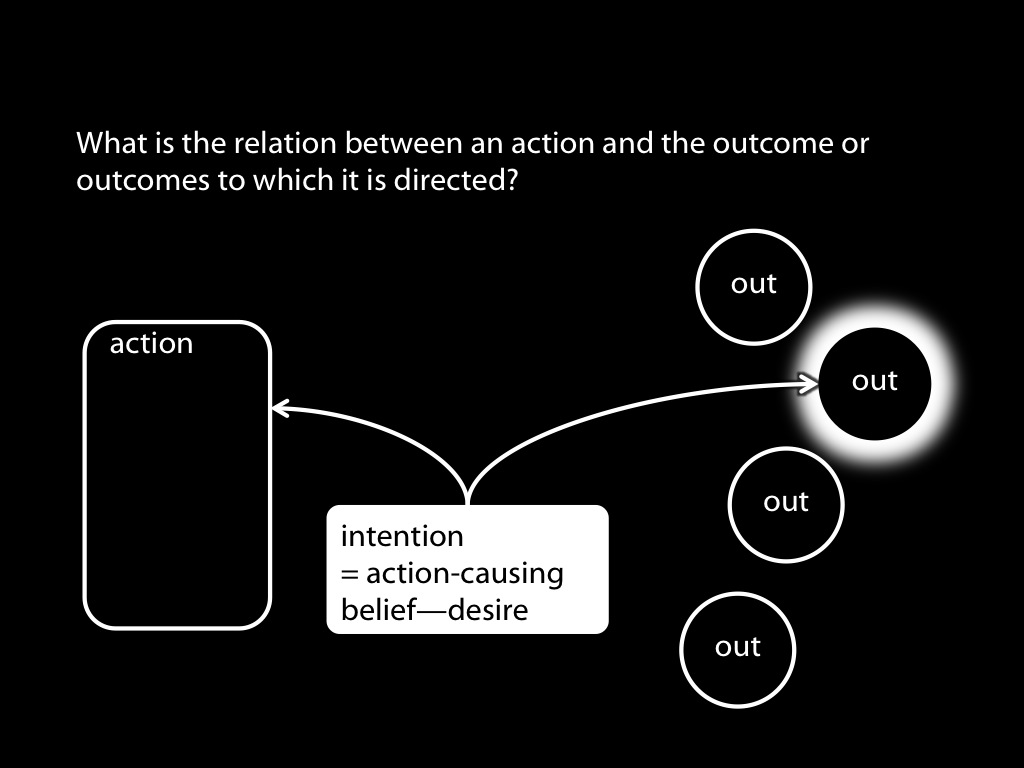
It appears, then, that we can explain the relation between an action and the goal or goals to which it is directed just in terms of belief and desire.
We don't need to introduce intentions as further mental states.
If we like we can say that an intention just is a suitable, action-causing belief-desire pair.
This view of intention is parallel to a view about knowledge.
Some suppose that knowledge is justified true belief.
Or belief meeting some condition like being true and justified.
On this sort of view, knowledge is not a mental state over and above belief.
Rather, there are just beliefs and some of these beliefs have a special status.
Similarly, Davidson's idea might be put by saying that intentions are just action-causing belief--desire pairs.
(This is not to say that \emph{any} belief--desire pair is an intention, of course.)
Now this isn't the right way to model adults' understanding of intention, but it's an approximation that works in the cases we're concerned with.
(Interesting question is why we can’t stop with intention = action-causing belief-desire pair and what intentions are for, but this is a topic for the course about reasons and actions.])
Tomasello and Call say that this *is* the model of action that underpins primate cognition
So should we just stop here?
There are at least three reasons not to stop but rather to look for alternative models of action
...
Reason (a): understanding intention is not something potentially less sophisticated than
understanding belief; on the contrary, even the simplest way of understanding intention
presupposes understanding belief (and desire).
So unless we think infants have a sophisticated understanding of mental states, we shouldn't
suppose that their model of action includes intention.
Reason (b) Minimal theory of mind ... presupposes an understanding of goal-directed action.
If we explain goal-directed action in terms of intention, we are thereby sneaking
beliefs and desire in through the back door. So the whole minimal theory of mind project would
fail.
(You might say, on minimal theory of mind that instead of beliefs and desires we could combine
registration and preference; but that would affect the construction since registration was
explained in terms of goal-directed action).
Reason (c): Mere curiosity. It would be good to see if there is any other, perhaps simpler way
of understanding this relation, perhaps one that doesn't involve insight into mental states.
So, is there a simpler model of the relation, one that infants might understand?

Pure Goal Ascription: the Teleological Stance
\section{Pure Goal Ascription: the Teleological Stance}
\section{Pure Goal Ascription: the Teleological Stance}
Earlier I said that \dfGoalAscription{}
Given this definition, goal ascription involves three things:
\begin{enumerate}
\item representing an action
\item representing an outcome
\end{enumerate}
and
\begin{enumerate}[resume]
\item capturing the directedness of the action to the outcome.
\end{enumerate}
It is important to see that the third item---capturing directedness---is necessary.
This is quite simple but very important, so let me slowly explain why goal ascription requires
representing the directedness of an action to an outcome.
Imagine two people, Ayesha and Beatrice, who each intend to break an egg.
Acting on her intention, Ayesha breaks her egg.
But Beatrice accidentally drops her egg while carrying it to the kitchen.
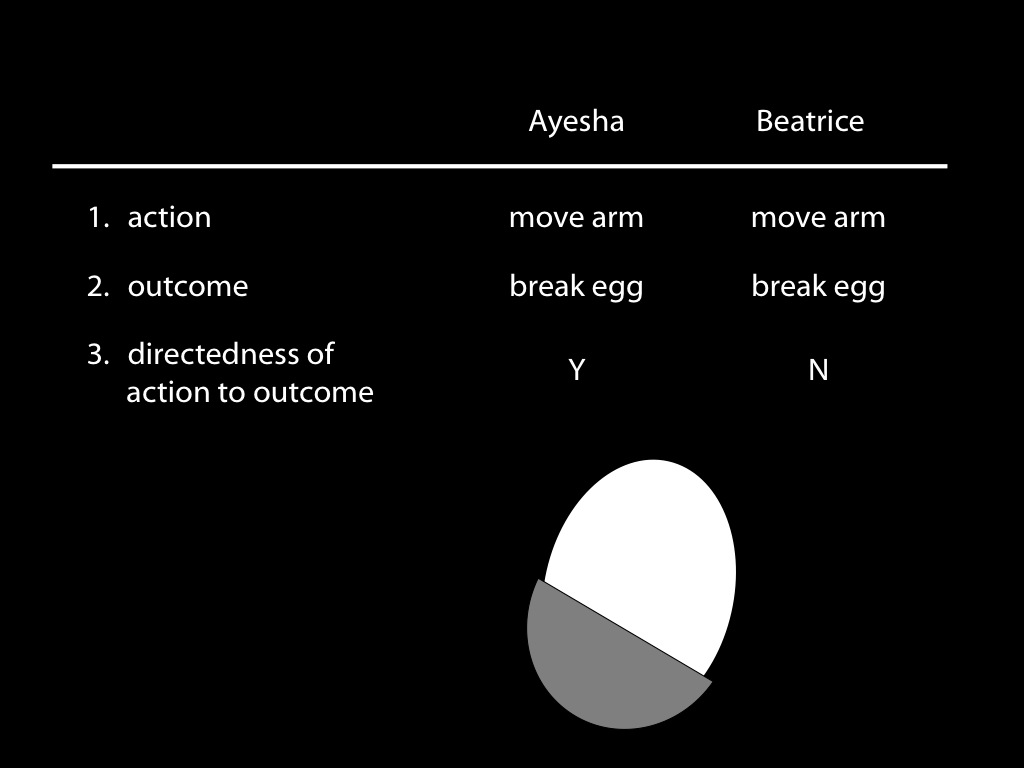
So Ayesha and Beatrice perform visually similar actions which result in the same type of outcome, the breaking of an egg;
but Beatrice's action is not directed to the outcome of her action whereas Ayesha's is.
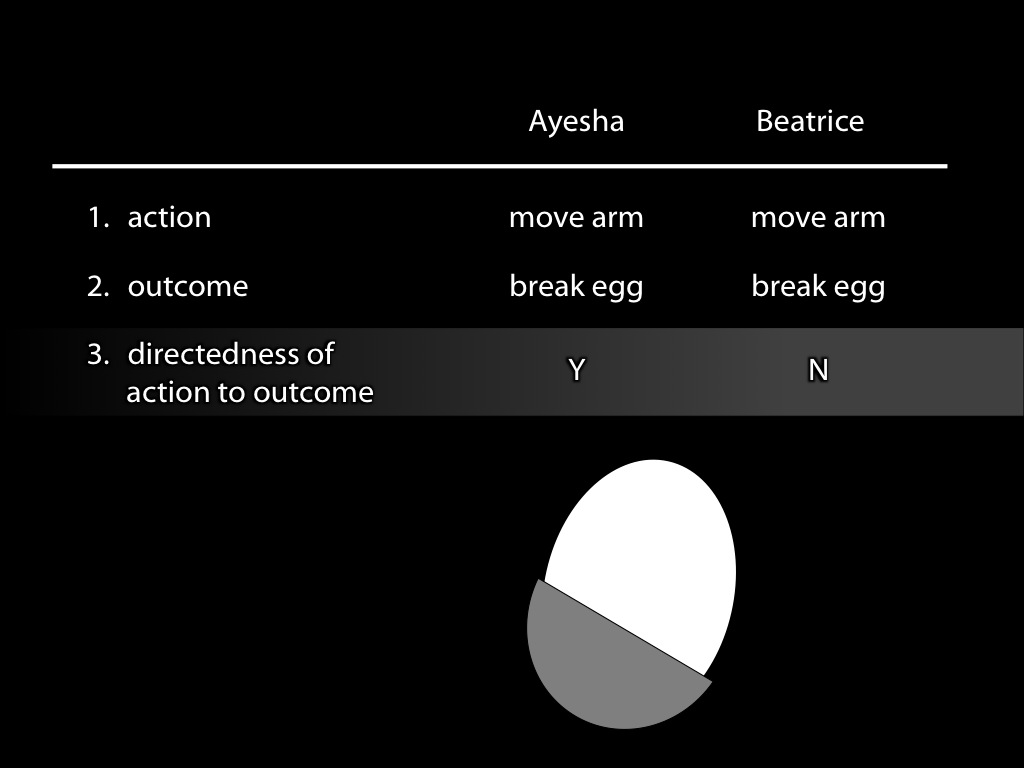
Goal ascription requires the ability to distinguish between Ayesha's action and Beatrice's
action.
This requires representing not only actions and outcomes but also the directedness of actions
to outcomes.
This is why I say that goal ascription requires capturing the directedness of an action to an
outcome, and not just representing the action and the outcome.
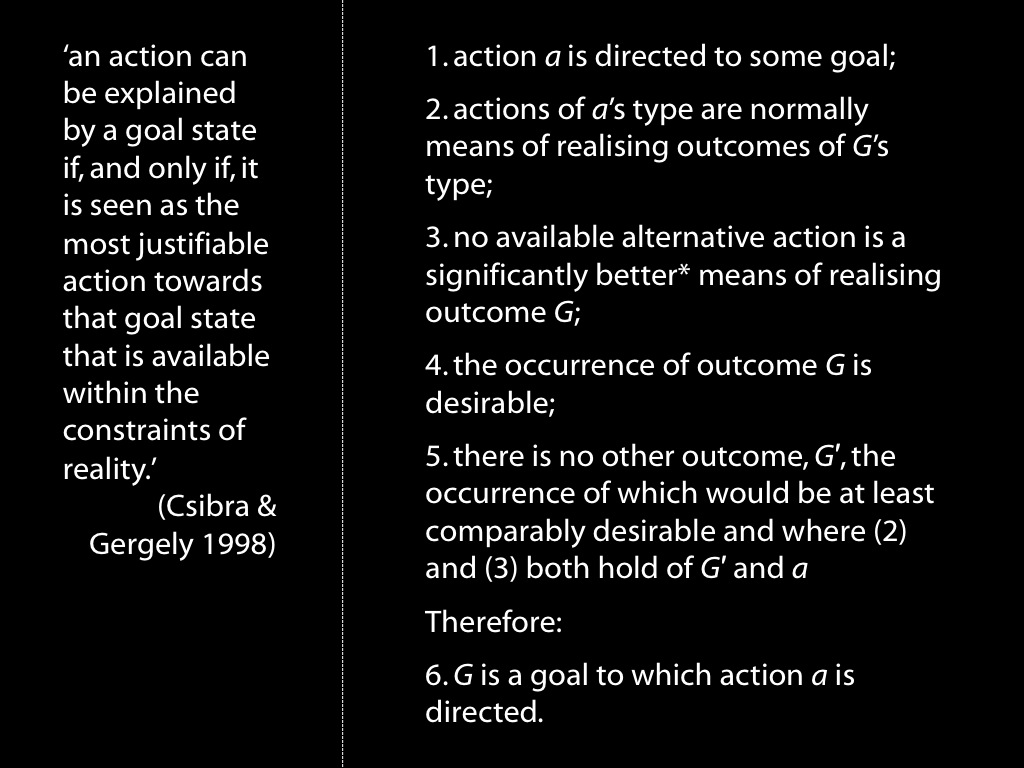
Csibra and Gergely offer a 'principle of rationality' according to which ...
Csibra & Gergely's principle of rational action: `an action can be explained by a goal state if, and only if, it is seen as the most justifiable action towards that goal state that is available within the constraints of reality.'\citep{Csibra:1998cx,Csibra:2003jv}
(Contrast a principle of efficiency:
`goal attribution requires that agents expend the least possible amount of energy within their
motor constraints to achieve a certain end' \citep[p.\ 1061]{Southgate:2008el}).
This principle plays two distinct roles.
One role is mechanistic: this principle forms part of an account of how infants (and others) actually ascribe goals.
Another role is normative: this principle also identifies grounds on which it would be rational to ascribe a goal.
As Csibra and Gergely formulate it, the principle might seem simple.
But actually their eloquence is hiding some complexity.
How are we to understand 'justifiable action towards that goal state?'

It is perhaps worth spelling out what might be involved in applying this principle.
Let me try to spell it out as an inference with premises and a conclusion ...
[*these notes are a bit jumbled ... I'm trying to fix some problems with their view in order
to focus on a key objection.]
What do we mean by `better means'?
Problem with defining $R$ in terms of rationality is requirement of core knowledge / modularity.
So what about efficiency instead of rationality?
One problem with defining $R$ in terms of minimising energy is that in
acting we often face a trade off between how much energy to put into an action and how likely
the action is to result in success.
Suppose I can save some energy by throwing the cup at the sink instead of walking over and
carefully placing it in the sink,
and suppose that I choose to walk over and place the cup in the sink.
In this situation the principle of efficiency fails to identify $G$, placing the cup in the
sink, as the goal of my action.
One way to address this problem might be to think of efficiency in terms of achieving a good trade-off between several factors:
not just energy but also the probability that a particular action will in fact result in the goal being achieved.
This is the idea I am trying to get at here ...
An action of type $a'$ is a better means of realising outcome $G$ in a given situation than an action of type $a$ if, for instance, actions of type $a'$ normally involve less effort than actions of type $a$
in situations with the salient features of this situation
and everything else is equal;
or if, for example, actions of type $a'$ are normally more likely to realise outcome $G$ than actions of type $a$
in situations with the salient features of this situation
and everything else is equal.
A problem with what we have so far is side-effects, which can be highly reliable.
Actions typically have side-effects which are not goals. For example,
suppose that I walk over here with the goal of being next to you.
This action has lots of side-effects:
\begin{itemize}
\item I will be at this location.
\item I will expend some energy.
\item I will be this much further away from the front
\end{itemize}
These are not goals to which my action is directed.
But they are things which my action would be a rational and efficient way of bring about.
So there is a risk that these optimising versions of $R$ will over-generate goals.
I think this first problem can be solved by adding a clause about desire.
[*] We can substantially mitigate the problem of side-effects by requiring that $R(a,G)$ hold only where $G$ is the type of outcome which is typically desirable for agents like $a$.
Now so far we've been considering this as an account of how someone could identify to which goal an action is directed without thinking about mental states.
That is, this inference is the core component in an account of pure goal ascription.
This gives us, in effect, a specification of R.
Recall that a model of action has to explain in virtue of what an action is directed to a goal.
This, as I mentioned, is standardly done by invoking intentions. But there is another way.
So the infants' model of action is one on which goals are goals in virtue of relations
between planning mechanisms and outcomes.
Note that this may not be a fully accurate model of action.
Just like impetus mechanics, it is useful even if only approximate.

From Action to Communication and Joint Action
\section{From Action to Communication and Joint Action}
\section{From Action to Communication and Joint Action}