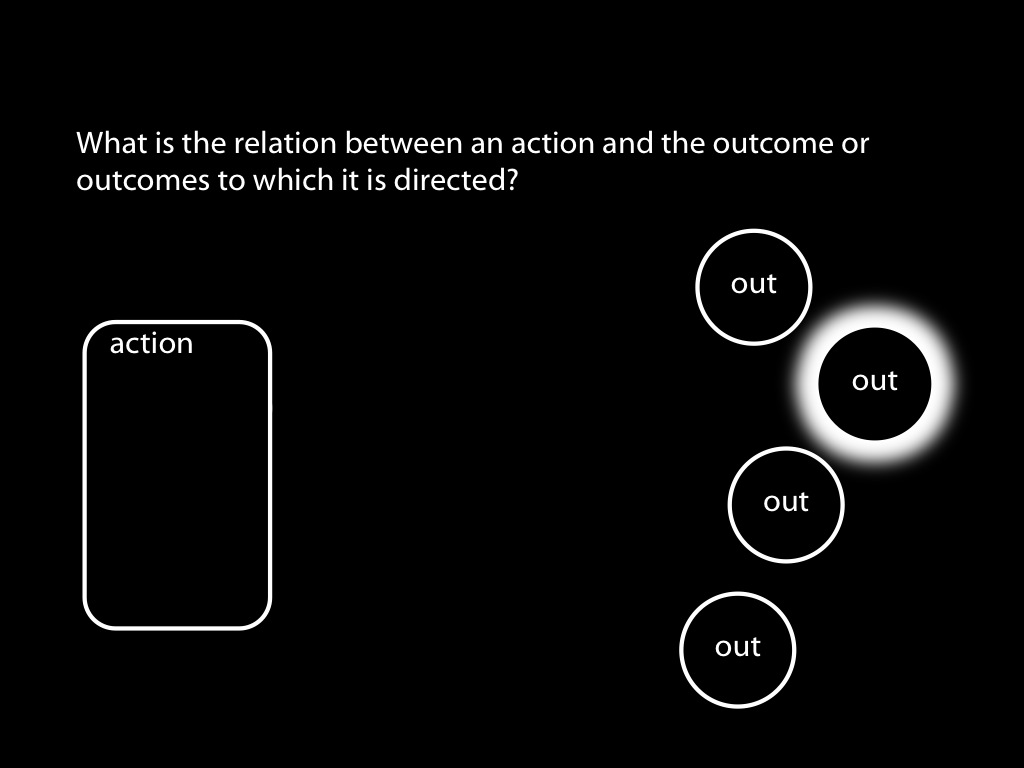
Earlier I said that \dfGoalAscription{}
Given this definition, goal ascription involves three things:
\begin{enumerate}
\item representing an action
\item representing an outcome
\end{enumerate}
and
\begin{enumerate}[resume]
\item capturing the directedness of the action to the outcome.
\end{enumerate}
It is important to see that the third item---capturing directedness---is necessary.
This is quite simple but very important, so let me slowly explain why goal ascription requires
representing the directedness of an action to an outcome.
Imagine two people, Ayesha and Beatrice, who each intend to break an egg.
Acting on her intention, Ayesha breaks her egg.
But Beatrice accidentally drops her egg while carrying it to the kitchen.
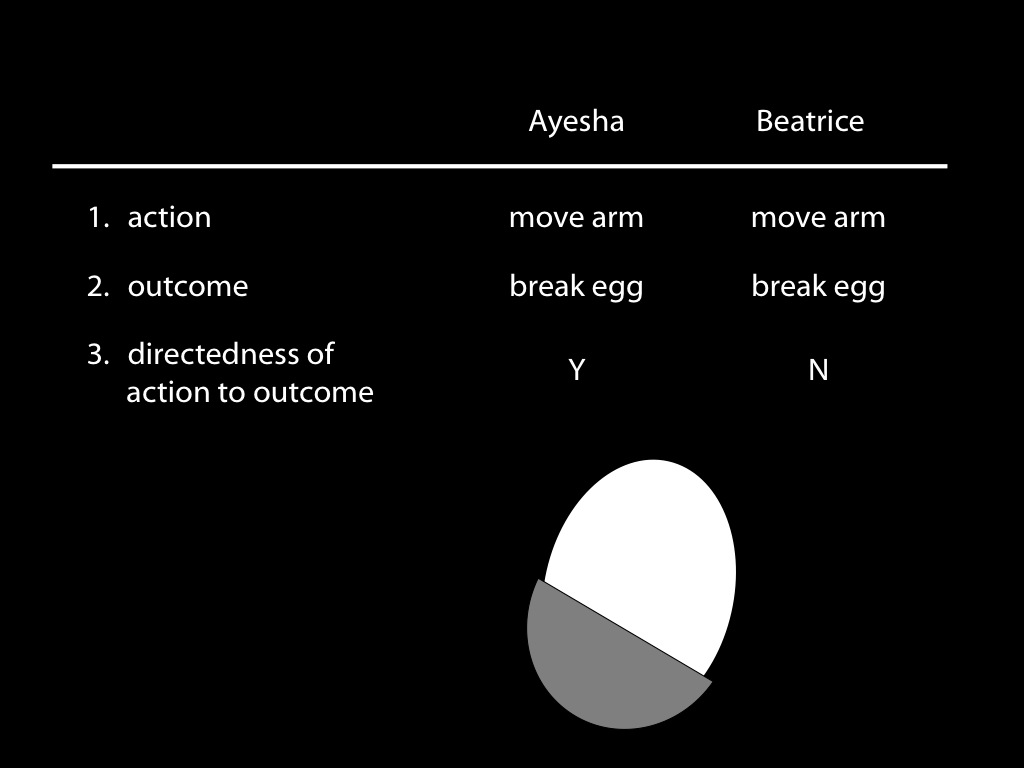
So Ayesha and Beatrice perform visually similar actions which result in the same type of outcome, the breaking of an egg;
but Beatrice's action is not directed to the outcome of her action whereas Ayesha's is.
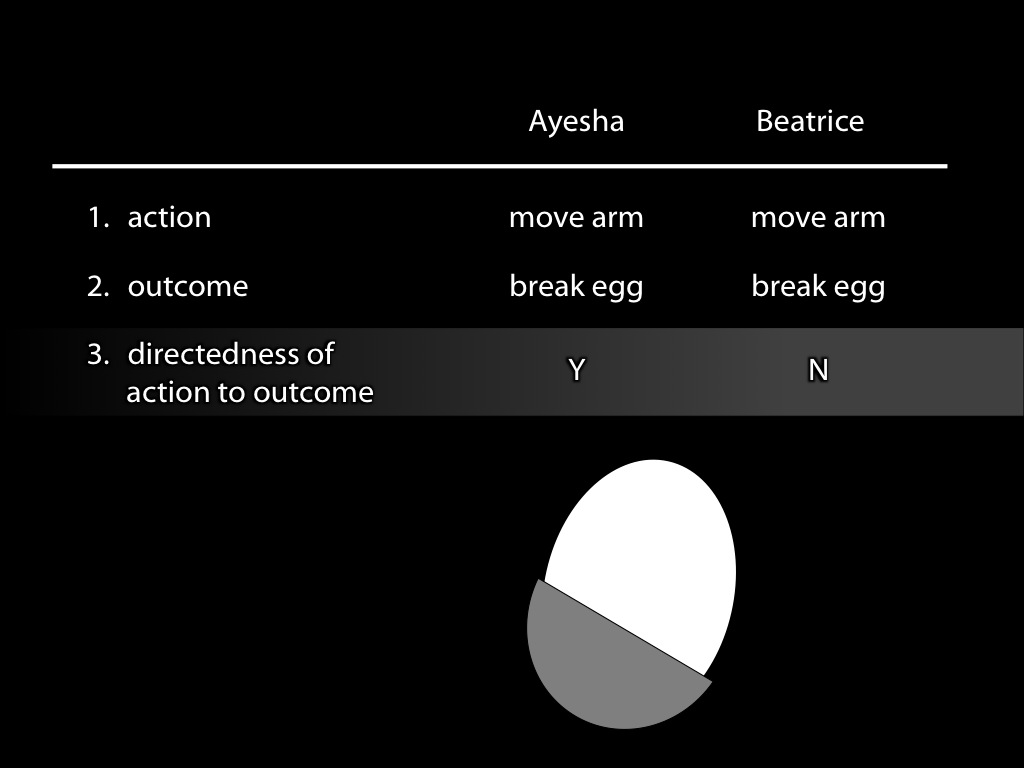
Goal ascription requires the ability to distinguish between Ayesha's action and Beatrice's
action.
This requires representing not only actions and outcomes but also the directedness of actions
to outcomes.
This is why I say that goal ascription requires capturing the directedness of an action to an
outcome, and not just representing the action and the outcome.
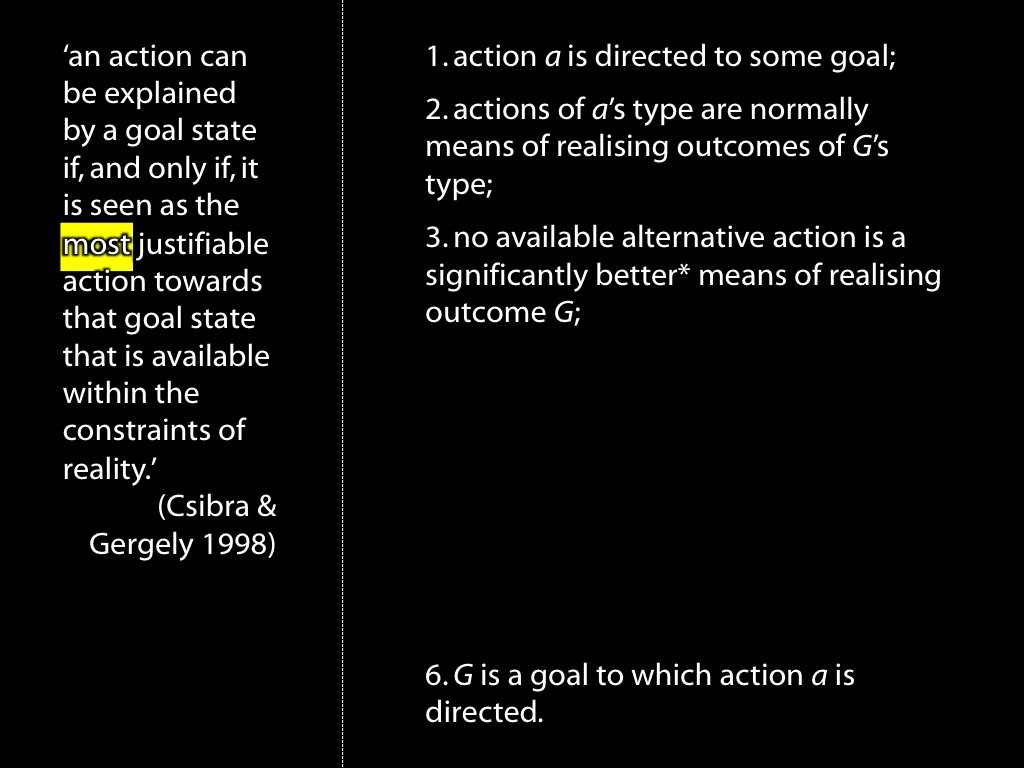
Csibra and Gergely offer a 'principle of rationality' according to which ...
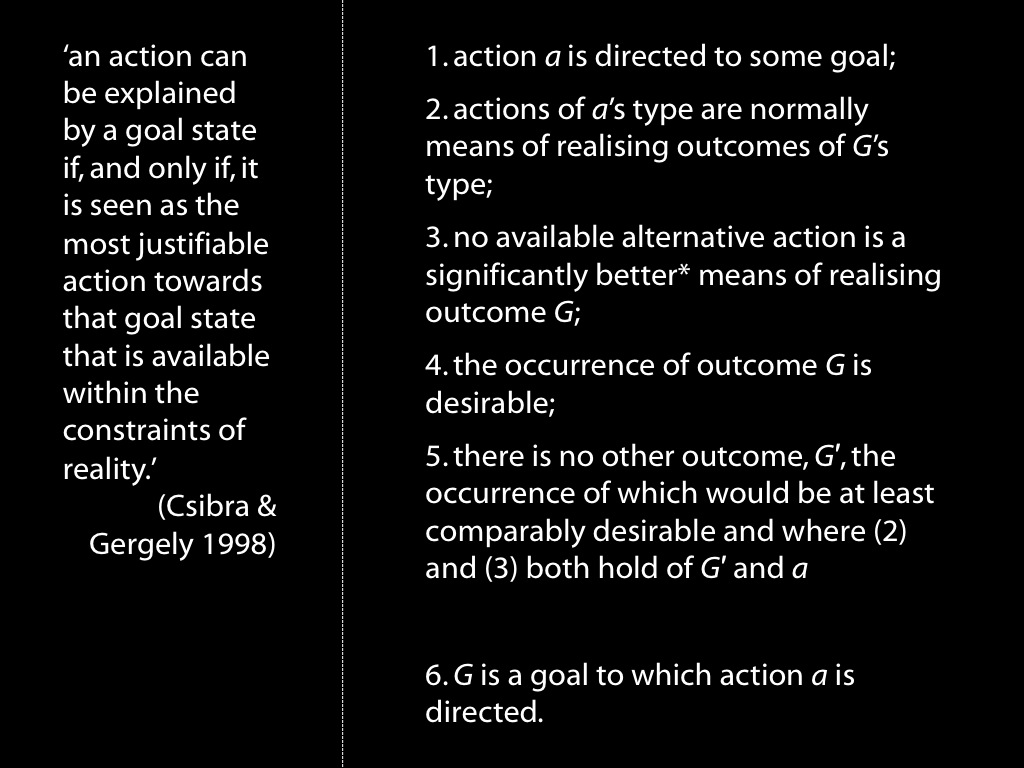
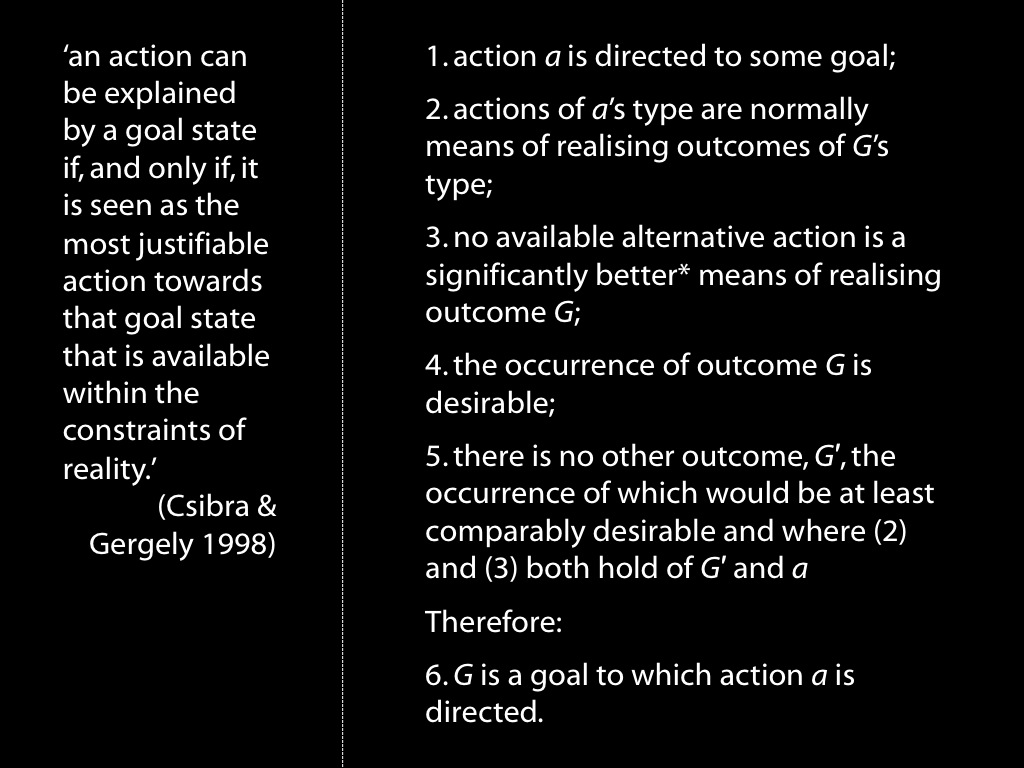
Csibra & Gergely's principle of rational action: `an action can be explained by a goal state if, and only if, it is seen as the most justifiable action towards that goal state that is available within the constraints of reality.'\citep{Csibra:1998cx,Csibra:2003jv}
(Contrast a principle of efficiency:
`goal attribution requires that agents expend the least possible amount of energy within their
motor constraints to achieve a certain end' \citep[p.\ 1061]{Southgate:2008el}).
This principle plays two distinct roles.
One role is mechanistic: this principle forms part of an account of how infants (and others) actually ascribe goals.
Another role is normative: this principle also identifies grounds on which it would be rational to ascribe a goal.
As Csibra and Gergely formulate it, the principle might seem simple.
But actually their eloquence is hiding some complexity.
How are we to understand 'justifiable action towards that goal state?'

It is perhaps worth spelling out what might be involved in applying this principle.
Let me try to spell it out as an inference with premises and a conclusion ...
[*these notes are a bit jumbled ... I'm trying to fix some problems with their view in order
to focus on a key objection.]
What do we mean by `better means'?
Problem with defining $R$ in terms of rationality is requirement of core knowledge / modularity.
So what about efficiency instead of rationality?
One problem with defining $R$ in terms of minimising energy is that in
acting we often face a trade off between how much energy to put into an action and how likely
the action is to result in success.
Suppose I can save some energy by throwing the cup at the sink instead of walking over and
carefully placing it in the sink,
and suppose that I choose to walk over and place the cup in the sink.
In this situation the principle of efficiency fails to identify $G$, placing the cup in the
sink, as the goal of my action.
One way to address this problem might be to think of efficiency in terms of achieving a good trade-off between several factors:
not just energy but also the probability that a particular action will in fact result in the goal being achieved.
This is the idea I am trying to get at here ...
An action of type $a'$ is a better means of realising outcome $G$ in a given situation than an action of type $a$ if, for instance, actions of type $a'$ normally involve less effort than actions of type $a$
in situations with the salient features of this situation
and everything else is equal;
or if, for example, actions of type $a'$ are normally more likely to realise outcome $G$ than actions of type $a$
in situations with the salient features of this situation
and everything else is equal.
A problem with what we have so far is side-effects, which can be highly reliable.
Actions typically have side-effects which are not goals. For example,
suppose that I walk over here with the goal of being next to you.
This action has lots of side-effects:
\begin{itemize}
\item I will be at this location.
\item I will expend some energy.
\item I will be this much further away from the front
\end{itemize}
These are not goals to which my action is directed.
But they are things which my action would be a rational and efficient way of bring about.
So there is a risk that these optimising versions of $R$ will over-generate goals.
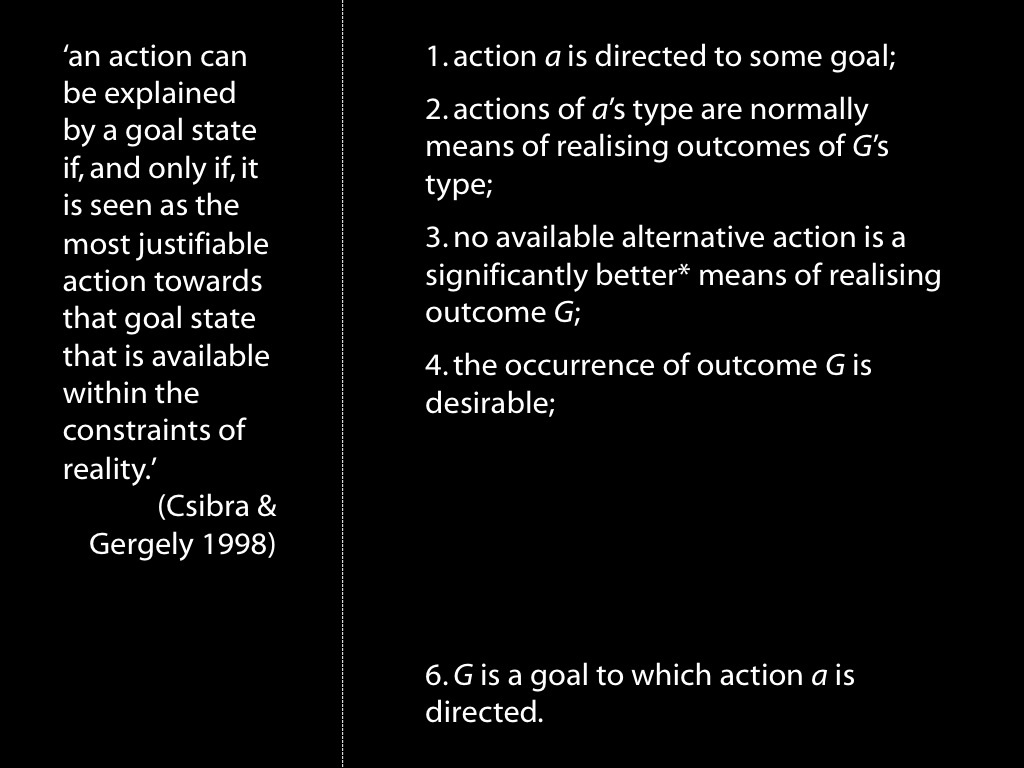
I think this first problem can be solved by adding a clause about desire.
[*] We can substantially mitigate the problem of side-effects by requiring that $R(a,G)$ hold only where $G$ is the type of outcome which is typically desirable for agents like $a$.
Now so far we've been considering this as an account of how someone could identify to which goal an action is directed without thinking about mental states.
That is, this inference is the core component in an account of pure goal ascription.
This gives us, in effect, a specification of R.
Recall that a model of action has to explain in virtue of what an action is directed to a goal.
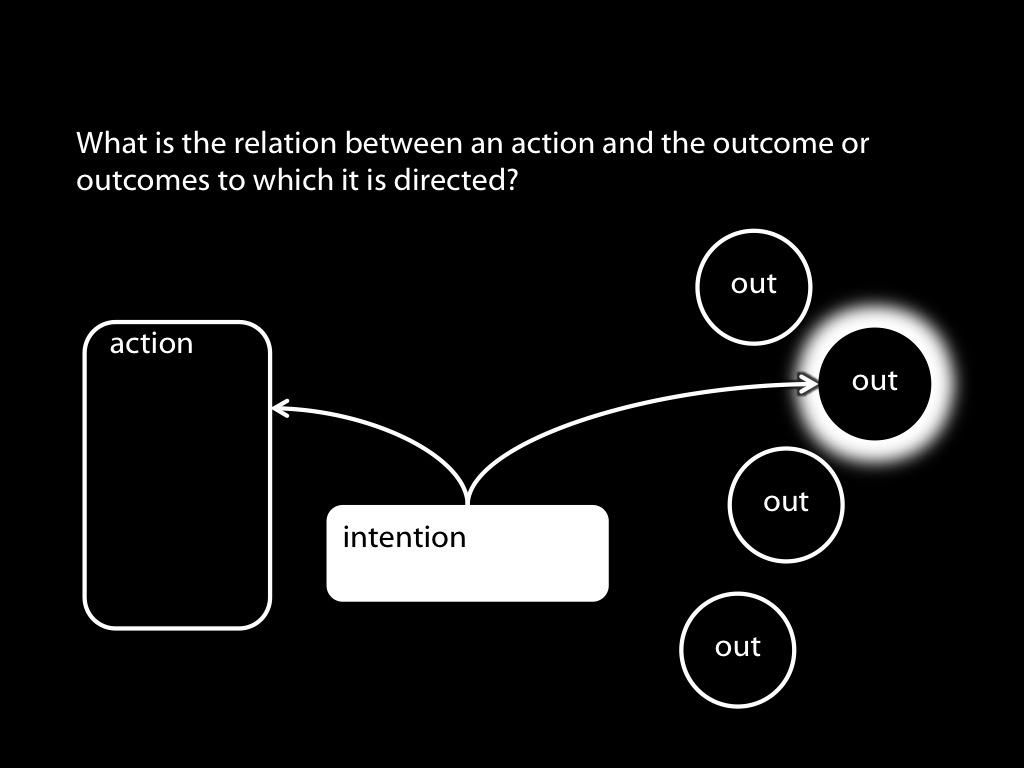
This, as I mentioned, is standardly done by invoking intentions. But there is another way.
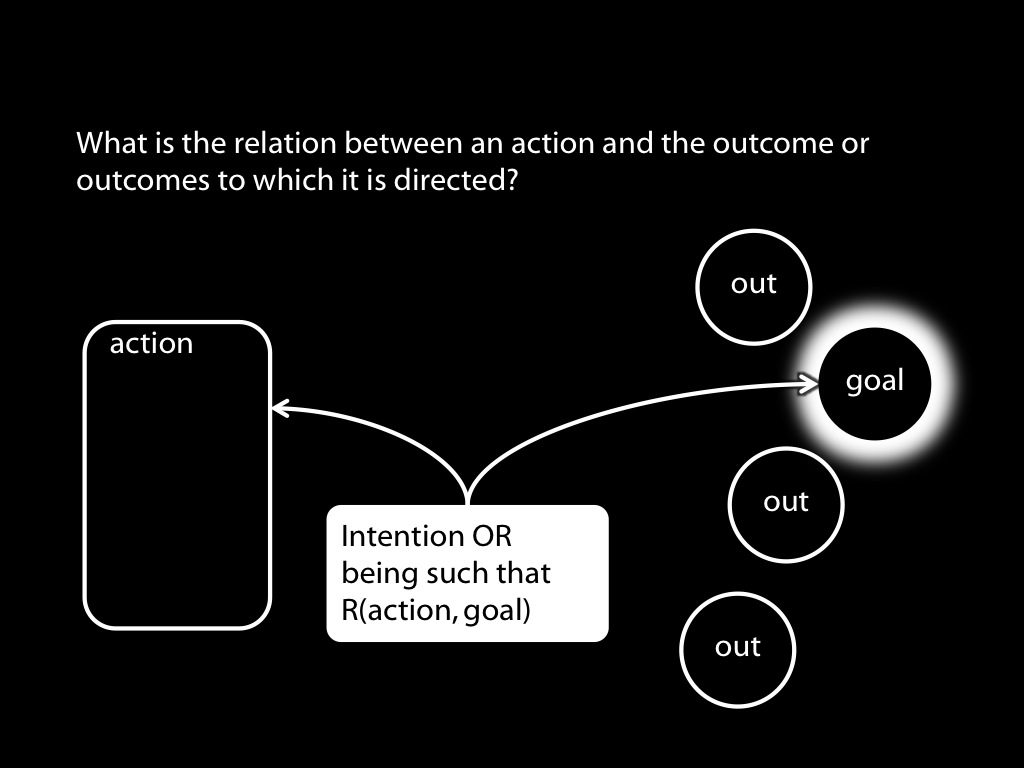
So the infants' model of action is one on which goals are goals in virtue of relations
between planning mechanisms and outcomes.
Note that this may not be a fully accurate model of action.
Just like impetus mechanics, it is useful even if only approximate.